
Jumat, 27 Mei 2011
Rabu, 11 Mei 2011
belajar robot
belajar robot adalah mempelajari teknologi penciptaan, satu hal keyakinan bahwa alam semesta ada yang menciptakan
Senin, 09 Mei 2011
robot agrikultur
Ada peningkatan kesadaran dan pengembangan robot pertanian di seluruh dunia. Di halaman ini saya akan mencoba untuk menyatukan link ke proyek-proyek yang saya tahu
 | Autonomous Crop Treatment Vehicle (1993-1996) Name: ACTV. Champion: Nick Tillett Type: Two wheel drive, differential steer Tillett and Hague Technology Ltd |
 | The Weedy robot from the Faculty of Engineering and Computer Science University of Applied Sciences Osnabrueck, Germany Name: Weedy. Champion: Arno Ruckelshausen Type: Four wheel drive / Four wheel steer A related paper can be found here (in German) |
 | The autonomous tractor developed at Copenhagen University in Denmark. Name: Hako. Champion: Hans Griepentrog Type: Rear wheel drive / Front wheel steer modified grounds tractor Power: 27hp Diesel Related projects: See RoboWeed and Safe and Reliable Notes: Standard front, centre and rear linkages allow multiple implements to be attached. Details can also be found on these pages here. |
 | The autonomous Christmas tree weeder developed at Copenhagen University in Denmark. Name: ACW. Champion: Henrik Have Type: Rear wheel drive / Front wheel steer modified grass cutter Power: 9 kW Petrol Notes: Retractable side cutter Details can also be found on these pages here. |
 | The Supportive Autonomous Vehicle for AGriculturE built my MSc students at the Piraeus Institute of Technology, Greece in collaboration with University of Thessaly. Name: SAVAGE. Champions: Kostas Tressos & Ioannis Andreou Type: 4WD / 4WS portal Power: 4x200W electric motors Notes: simple mechanical design allowed fabrication by blacksmith. |
 | The Autonomous Platform and Information system. Originally built by 2 MSc Students at the Danish Technical University (Mobile Robot for Weeding). Their thesis can be found here. Further work was carried out on the API design by 3 MSc students at Aalborg university. Name: API. Champion:? Type: 4WD / 4WS portal Power: Battery + 4x?W wheel motors Related projects: See the Agrobotics project and the ACROSS project. Notes: Two versions were made |
 | The Hortibot, an integration between the Spider grass cutter and the API built at DIAS in Denmark. Videos can be found here. Name: Hortibot. Champion: Rasmus Jørgensen Type: 4WD / 4WS modified grass cutter Power: 13kW Petrol. Notes: Modified to allow rotation, smart micro sprayer added.
|
 | The FieldRobot event. Although technically not a robot in itself the annual FieldRobot event does promote many good agricultural robots.
|
 | Weeding robot developed at Wageningen UR by Tijmen Bakker. (Presentation) Name: ?. Champion: Tijmen Bakker Type: 4WD / 4WS Portal tractor Power: Diesel engine Notes: Tijmen successfully defended his PhD 13 Feb 2009 |
 | The SlugBot was developed to investigate the issues of energetic autonomy, by harvesting slugs and putting them into a digester to power the robot! Name: SlugBot. Champion: Ian Kelly Type: 4WD skid steer Power: (2 slugs per hour? ;) Notes: See also EcoBots |
 | EcoBots I and II developed at the Bristol Robotics Laboratory, UK, use microbial fuel cells to power themselves - but very slowly. Name: EcoBot. Champion: Chris Melhuish Type: 2WD differential steer Power: Dead flies Notes: |
 | The Halmstad weeding robot, Sweden. Name: ?. Champion: Albert-Jan Baerveldt / Björn Åstrand Type: Rear wheel drive / Front wheel steer Power: ? Petrol engine Notes: Vision guidance and plant recognition with mechanical weeding |
 | The Modulaire tractor was designed as a remote controlled tractor in the 1990s. Nine were built in Finland and one was modified for GPS control. Here is a movie. (DivX, 4MB) Name: Modulaire. Champion:? Type: tracks Power: 40hp Notes: Front and rear linkages
|
 | Autonomous guidance projects at the University of Illinois at Urbana-Champaign, USA Name:? Champion: Qin Zhang Type: Rear wheel drive / Front wheel steer Power: ? Notes: Conventional tractor modified for automatic steering |
 | The AgRover robot being developed at Iowa State University, USA Name: AgRover. Champion: Lie Tang Type: Four wheel drive / Four wheel steer Power: Battery + 4 wheel motors Notes: Self levelling frame |
 | The Skinny Boy robot being developed at USP san Carlos, (with EMBRAPA) Brazil. Name: Skinny Boy. Champion: Ricardo Inamasu Type: Four wheel drive / Four wheel steer Power: Battery + 4 wheel motors Notes: large stable space frame |





evolusi ponsel (telepon selular)
evolusi ponsel dari berbagai sumber
1. SCR-194 (1938)

Alat komunasi ini adalah 'mbahnya' ponsel. SCR-194 dan SCR-195 adalah radio AM portabel pertama di dunia. Ia dibuat oleh US ARMY Signal Corps Engineering Laboratories di Fort Monmouth, New Jersey. Alat yang dipandang sebagai walkie talkie pertama itu bobotnya sekitar 11 kg dan berdaya jangkau 8 km.
2. SCR-300 (1940)
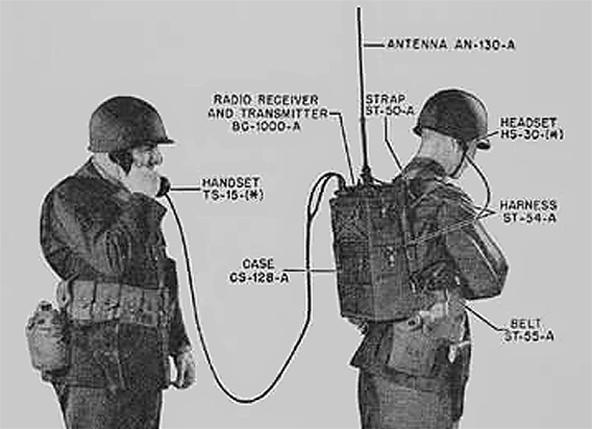
Alat ini adalah pengganti SCR-195. Dikembangkan oleh Motorola, SCR-300 merupakan radio FM portabel yang digunakan oleh pasukan sekutu pada perang dunia II. Bobotnya antara 14-17 kg, dengan radius jangkauan 4,8 km.
3. SCR-536 (1942)

Motorola memproduksi 'handie talkie' ini untuk AS, sebagai pengembangan dari dua alat komunikasi sebelumnya. Dengan menggunakan teknologi radio AM, SCR-536 beratnya jauh lebih ringan, yakni hanya 2,27 kg dengan daya jangkau 1,6 km.
4. MTA (1956)

Mobile System A (MTA) ini adalah perangkat komunikasi besutan Ericsson dan digunakan oleh Swedia. Bobotnya 40 kg atau setara dengan bobot 300 unit ponsel iPhone.
5. DYNATAC (1973)
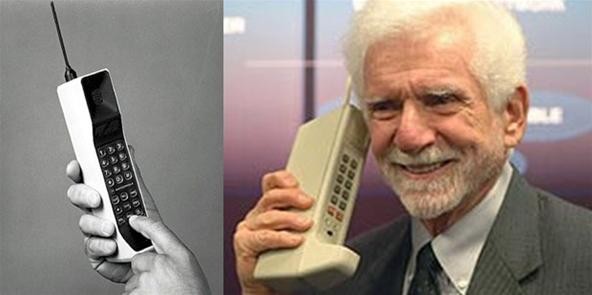
Motorola membuat prototipe telepon portabel Dynamic Adaptive Total Area Coverage (DYNATAC) sebagai ponsel pribadi praktis pertama. Di gambar, bekas Wakil Presiden Motorola Martin Cooper tengah menelepon pesaingnya dari Bell Labs, Joel S Engel.
6. DynaTAC (1983)

Sepuluh tahun setelah kemunculan prototipe DynaTAC, Motorola mulai memasarkan ponsel ini ke publik. Dengan bobot seberat 0,9 kg, DYNATAC bekerja di jaringan teknologi AMPS, layanan selular analog generasi pertama di Amerika Utara.
7. MicroTAC (1989)
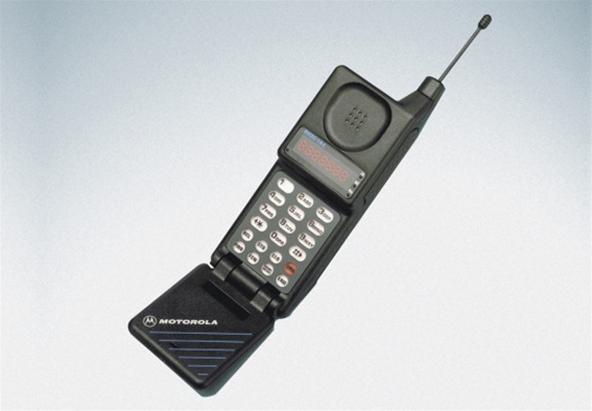
Motorola memperkenalkan MicroTAC yang merupakan desain ponsel flip pertama di dunia. Desain ini mengurangi ukuran ponsel saat tidak digunakan. Dengan ukurannya yang kecil. MicroTAC juga merupakan ponsel saku pertama di dunia.
8. StarTAC (1996)
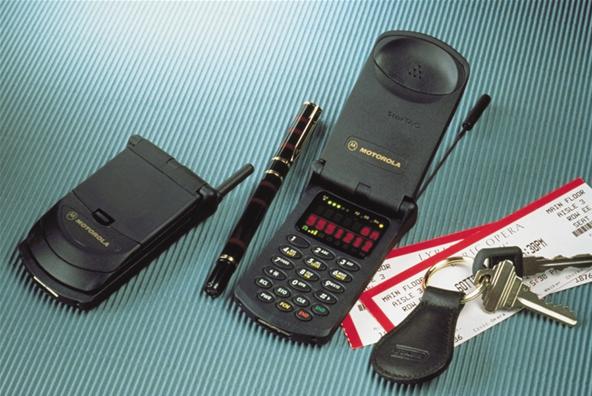
Melanjutkan lini TAC-nya, Motorola kemudian meluncurkan ponsel clamshell pertama bernama StarTAC yang bisa dilipat seperti cangkang kerang. Menurut Motorola, ponsel ini terinspirasi oleh perangkat komunikasi yang muncul pada film serial Star Trek.
9. Communicator (1997)
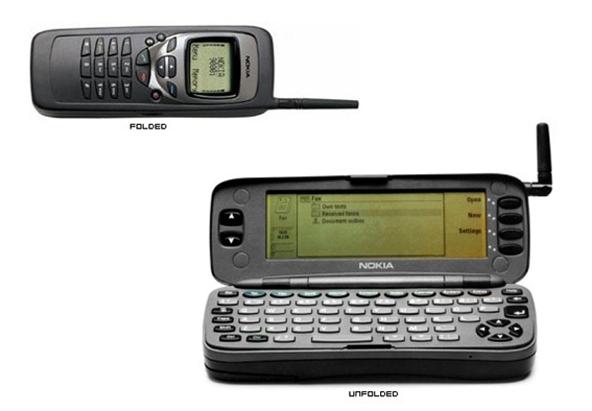
Nokia 9000 Communicator adalah ponsel yang membawa pengguna memasuki era ponsel pintar atau smartphone. Dengan desain clamshell-nya, ponsel ini yang pertama menyediakan layar LCD serta papan kunci QWERTY yang utuh.
10. Benefon (1999)
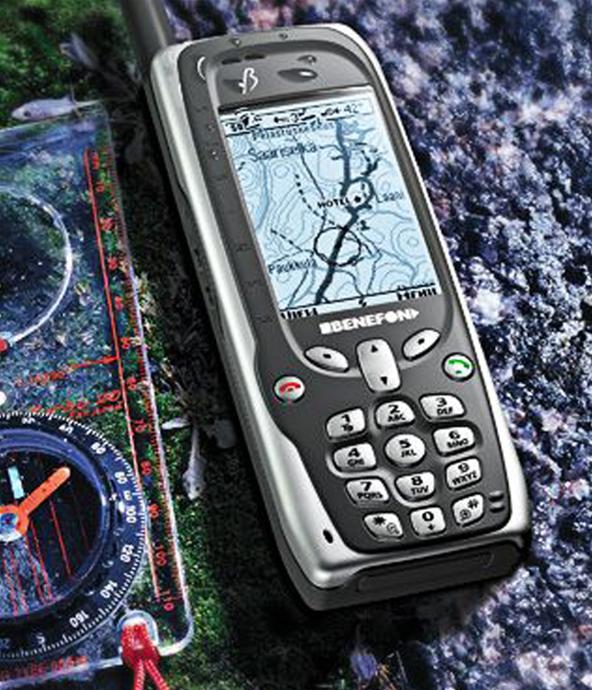
Geosentric merupakan vendor ponsel pertama yang membuat ponsel yang terintegrasi dengan perangkat GPS. Tak cuma itu, ponsel bernama Benefon ini tahan cipratan air, menggunakan greyscale, serta menyediakan peta untuk melacak posisi dan pergerakan pengguna.
11. VP-201 (1999)
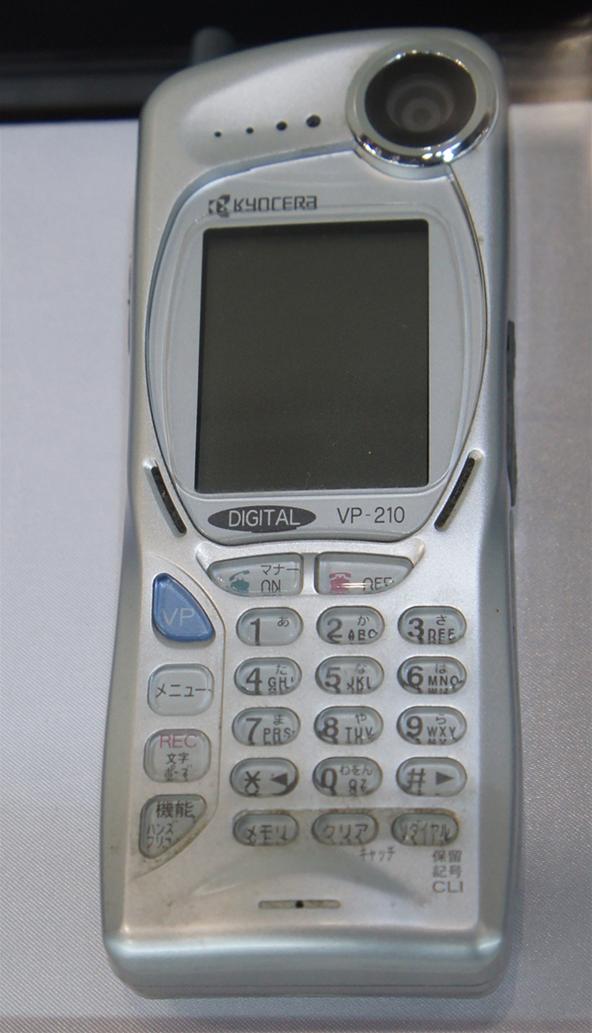
Di Jepang, Kyocera meluncurkan ponsel VP-201 yang merupakan ponsel pertama yang memiliki kamera terintegrasi.
12. BlackBerry 5810 (2002)
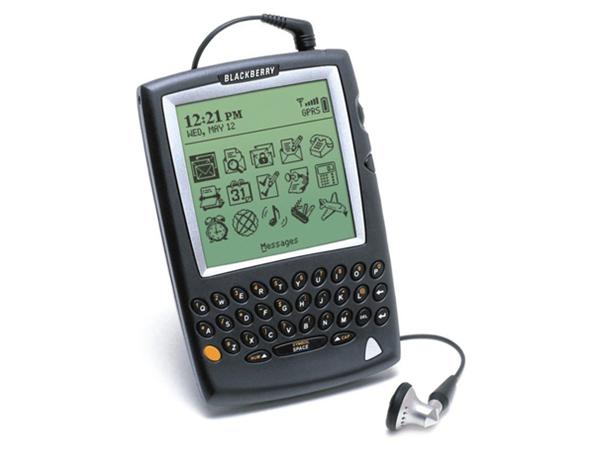
RIM meluncurkan perangkat BlackBerry pertama yang terintegrasi dengan ponsel. Ini adalah ponsel yang menyasar pengguna profesional yang membutuhkan layanan email seketika dan penyesuaian skedul. Kelemahannya, perangkat ini tak punya speaker dan mikrofon.
13. iPhone (2007)

Steve Jobs mulai mengenalkan Apple iPhone pada 2007, sebuah ponsel pintar revolusioner yang menggunakan layar sentuh sekaligus mengadopsi teknologi 3G.
14. HTC EVO 4G (2010)

Ponsel ini adalah ponsel pertama yang mengadopsi standar 4G, dan beroperasi di jaringan WiMAX. Dengan sistem operas Android 2.1, ia merupakan ponsel berlayar sentuh paling besar, kamera 8 MP, perekam video definisi tinggi, keluaran HDMI, fitur Mobile Hotspot, dan antar muka HTC Sense.
robot agrikultur pertanian
Ada peningkatan kesadaran dan pengembangan robot pertanian di seluruh dunia. Di halaman ini saya akan mencoba untuk menyatukan link ke proyek-proyek yang saya tahu
| | Autonomous Crop Treatment Vehicle (1993-1996) Name: ACTV. Champion: Nick Tillett Type: Two wheel drive, differential steer Tillett and Hague Technology Ltd |
| | The Weedy robot from the Faculty of Engineering and Computer Science University of Applied Sciences Osnabrueck, Germany Name: Weedy. Champion: Arno Ruckelshausen Type: Four wheel drive / Four wheel steer A related paper can be found here (in German) |
| | The autonomous tractor developed at Copenhagen University in Denmark. Name: Hako. Champion: Hans Griepentrog Type: Rear wheel drive / Front wheel steer modified grounds tractor Power: 27hp Diesel Related projects: See RoboWeed and Safe and Reliable Notes: Standard front, centre and rear linkages allow multiple implements to be attached. Details can also be found on these pages here. |
| | The autonomous Christmas tree weeder developed at Copenhagen University in Denmark. Name: ACW. Champion: Henrik Have Type: Rear wheel drive / Front wheel steer modified grass cutter Power: 9 kW Petrol Notes: Retractable side cutter Details can also be found on these pages here. |
| | The Supportive Autonomous Vehicle for AGriculturE built my MSc students at the Piraeus Institute of Technology, Greece in collaboration with University of Thessaly. Name: SAVAGE. Champions: Kostas Tressos & Ioannis Andreou Type: 4WD / 4WS portal Power: 4x200W electric motors Notes: simple mechanical design allowed fabrication by blacksmith. |
| | The Autonomous Platform and Information system. Originally built by 2 MSc Students at the Danish Technical University (Mobile Robot for Weeding). Their thesis can be found here. Further work was carried out on the API design by 3 MSc students at Aalborg university. Name: API. Champion:? Type: 4WD / 4WS portal Power: Battery + 4x?W wheel motors Related projects: See the Agrobotics project and the ACROSS project. Notes: Two versions were made |
| | The Hortibot, an integration between the Spider grass cutter and the API built at DIAS in Denmark. Videos can be found here. Name: Hortibot. Champion: Rasmus J�rgensen Type: 4WD / 4WS modified grass cutter Power: 13kW Petrol. Notes: Modified to allow rotation, smart micro sprayer added.
|
| | The FieldRobot event. Although technically not a robot in itself the annual FieldRobot event does promote many good agricultural robots.
|
| | Weeding robot developed at Wageningen UR by Tijmen Bakker. (Presentation) Name: ?. Champion: Tijmen Bakker Type: 4WD / 4WS Portal tractor Power: Diesel engine Notes: Tijmen successfully defended his PhD 13 Feb 2009 |
| | The SlugBot was developed to investigate the issues of energetic autonomy, by harvesting slugs and putting them into a digester to power the robot! Name: SlugBot. Champion: Ian Kelly Type: 4WD skid steer Power: (2 slugs per hour? ;) Notes: See also EcoBots |
| | EcoBots I and II developed at the Bristol Robotics Laboratory, UK, use microbial fuel cells to power themselves - but very slowly. Name: EcoBot. Champion: Chris Melhuish Type: 2WD differential steer Power: Dead flies Notes: |
| | The Halmstad weeding robot, Sweden. Name: ?. Champion: Albert-Jan Baerveldt / Bj�rn �strand Type: Rear wheel drive / Front wheel steer Power: ? Petrol engine Notes: Vision guidance and plant recognition with mechanical weeding |
| | The Modulaire tractor was designed as a remote controlled tractor in the 1990s. Nine were built in Finland and one was modified for GPS control. Here is a movie. (DivX, 4MB) Name: Modulaire. Champion:? Type: tracks Power: 40hp Notes: Front and rear linkages
|
| | Autonomous guidance projects at the University of Illinois at Urbana-Champaign, USA Name:? Champion: Qin Zhang Type: Rear wheel drive / Front wheel steer Power: ? Notes: Conventional tractor modified for automatic steering |
| | The AgRover robot being developed at Iowa State University, USA Name: AgRover. Champion: Lie Tang Type: Four wheel drive / Four wheel steer Power: Battery + 4 wheel motors Notes: Self levelling frame |
| | The Skinny Boy robot being developed at USP san Carlos, (with EMBRAPA) Brazil. Name: Skinny Boy. Champion: Ricardo Inamasu Type: Four wheel drive / Four wheel steer Power: Battery + 4 wheel motors Notes: large stable space frame |
Langganan:
Postingan (Atom)